2.0 KiB
2.0 KiB
| title | author | date | geometry |
|---|---|---|---|
| Weapon Systems Homework 3 | Aidan Sharpe | February 17th, 2025 | margin=1in |
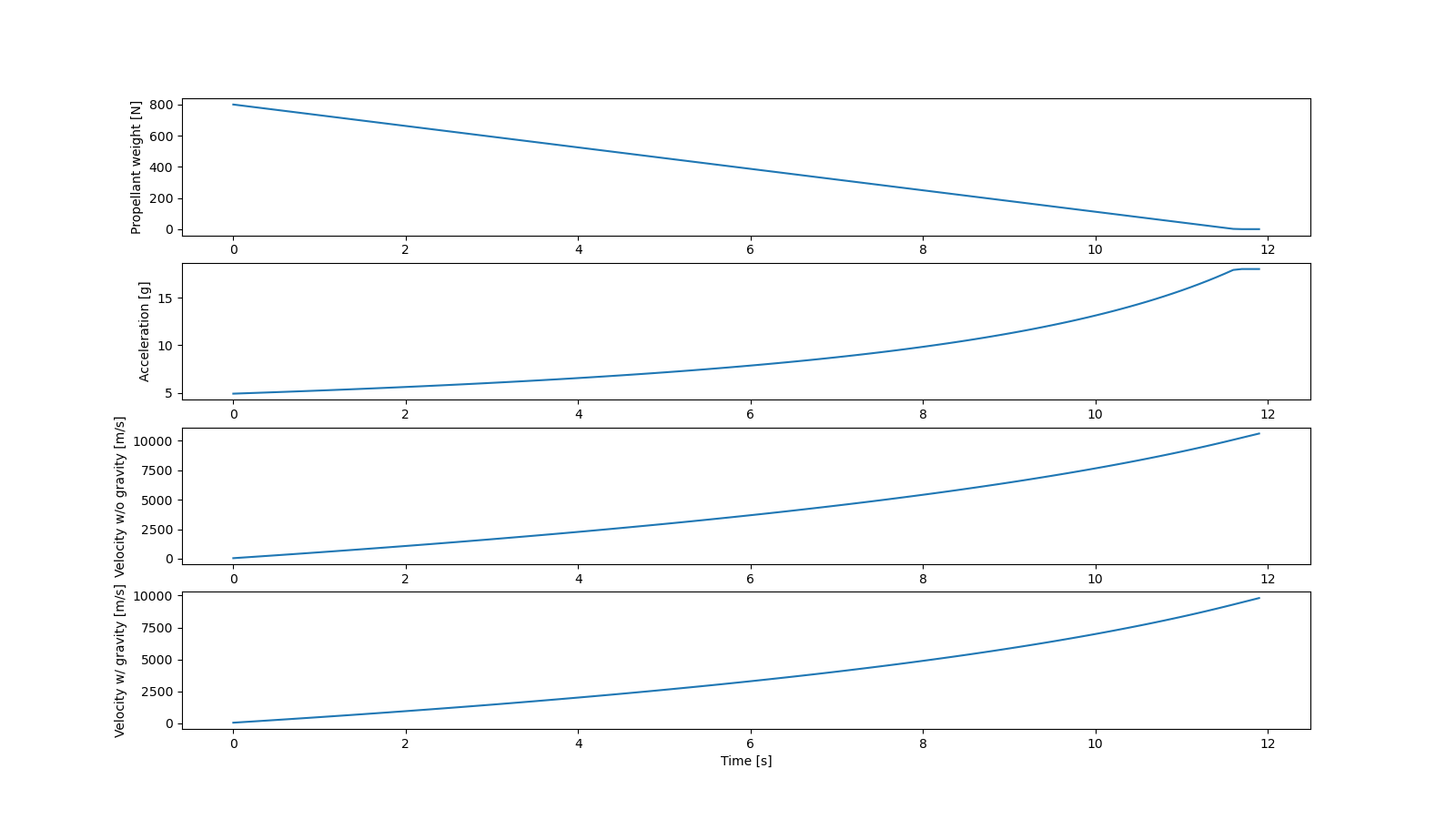
1. Rocket Motor Equation
def specific_impulse(v_burnout, w_launch, w_burnout):
return v_burnout / (g*np.log(w_launch/w_burnout))
def main():
v_burnout = 1000
w_rocket = 300
w_propellant_0 = 800
w_lauch = w_rocket + w_propellant_0
I_sp = specific_impulse(v_burnout, w_lauch, w_rocket)
v_exit = I_sp * g
print("I_sp:", I_sp)
print("V_e:", v_exit)
# Assume constant weight flow rate
a_burnout = 18*g
weight_flow_rate = a_burnout*w_rocket/v_exit
dt = 0.1
t = np.arange(0, 12, dt)
w_propellant = w_propellant_0 - weight_flow_rate*t
w_propellant = np.maximum(w_propellant, 0)
thrust = weight_flow_rate*v_exit/g
w_total = w_rocket + w_propellant
# Acceleration in g is force/weight
acceleration_g = thrust/w_total
v_no_gravity = np.cumsum(acceleration_g*g)
v_gravity_45_x = v_no_gravity*np.cos(np.pi/4)
v_gravity_45_y = v_no_gravity*np.sin(np.pi/4) - np.cumsum(g*np.ones_like(acceleration_g))
v_gravity_45 = np.sqrt(v_gravity_45_x**2 + v_gravity_45_y**2)
I_{SP} = 78.46
V_e = 769.66
2. Projectile with Attack Angle
I have been re-writing the math from the cannonball exercise to make it easier to expand in the future. For this reason, I am still working on my simulation routine:
def simulate(mass, position, velocity, acceleration, attack_angle):
altitude = position[1]
speed = np.linalg.norm(velocity, 2)
Mach = atmosphere.Mach(altitude, speed)
axial_drag = np.array([-axial_drag.CA(Mach), 0])
dynamic_pressure = atmosphere.dynamic_pressure(altitude, velocity)
elevation = np.atan(velocity[1]/velocity[0]) + attack_angle
gravity = mass*g*np.array([np.cos(-angle-np.pi/2), np.sin(-angle-np.pi/2)])
normal_force = np.zeros(2)
normal_force[1] = TARGET_ACCEL - np.linalg.norm(axial_drag + gravity, 2)