# Chapter 1 - Continuous Time Signals
#### Continuous Time Signal
A continuous time signal is a function $x(t)$ that maps values from $\Reals$ to $\Reals$ or $\Complex$.
#### Causal Signals
A signal, $x(t)$, is said to be causal if it has value $0$ for $t<0$.
#### Non-causal Signals
A signal, $x(t)$, is said to be *non-causal*, or *not causal*, if $x(t)$ is not $0$ for all $t<0$.
#### Finite Support
A signal, $x(t)$, is said to have *finite support*, or *finite duration*, if there exists inputs $T_1$ and $T_2$ such that $x(t) = 0$ for $t < T_1$ and $t > T_2$.
#### Infinite Support
A signal, $x(t)$, is said to have *infinite support*, or *infinite duration*, if it does not have infinite support.
There are three types of inifinite support:
1. *Right-sided*: the signal has domain $(T_1, +\infty)$
1. *Left-sided*: the signal has domain $(-\infty, T_2)$
1. *Two-sided*: the signal has domain $(-\infty, +\infty)$
## 1.1 Basic Signal Operations
#### Signal Addition
Signal addition is of the form: $z(t) = x(t) + y(t)$, where the amplitude of the signal $z(t)$ is the net amplitude of $x(t)$ and $y(t)$.
#### Scalar Multiplication
Scalar multiplication is of the form: $z(t)=\alpha x(t)$. The amplitude of the output is proportional to $\alpha$.
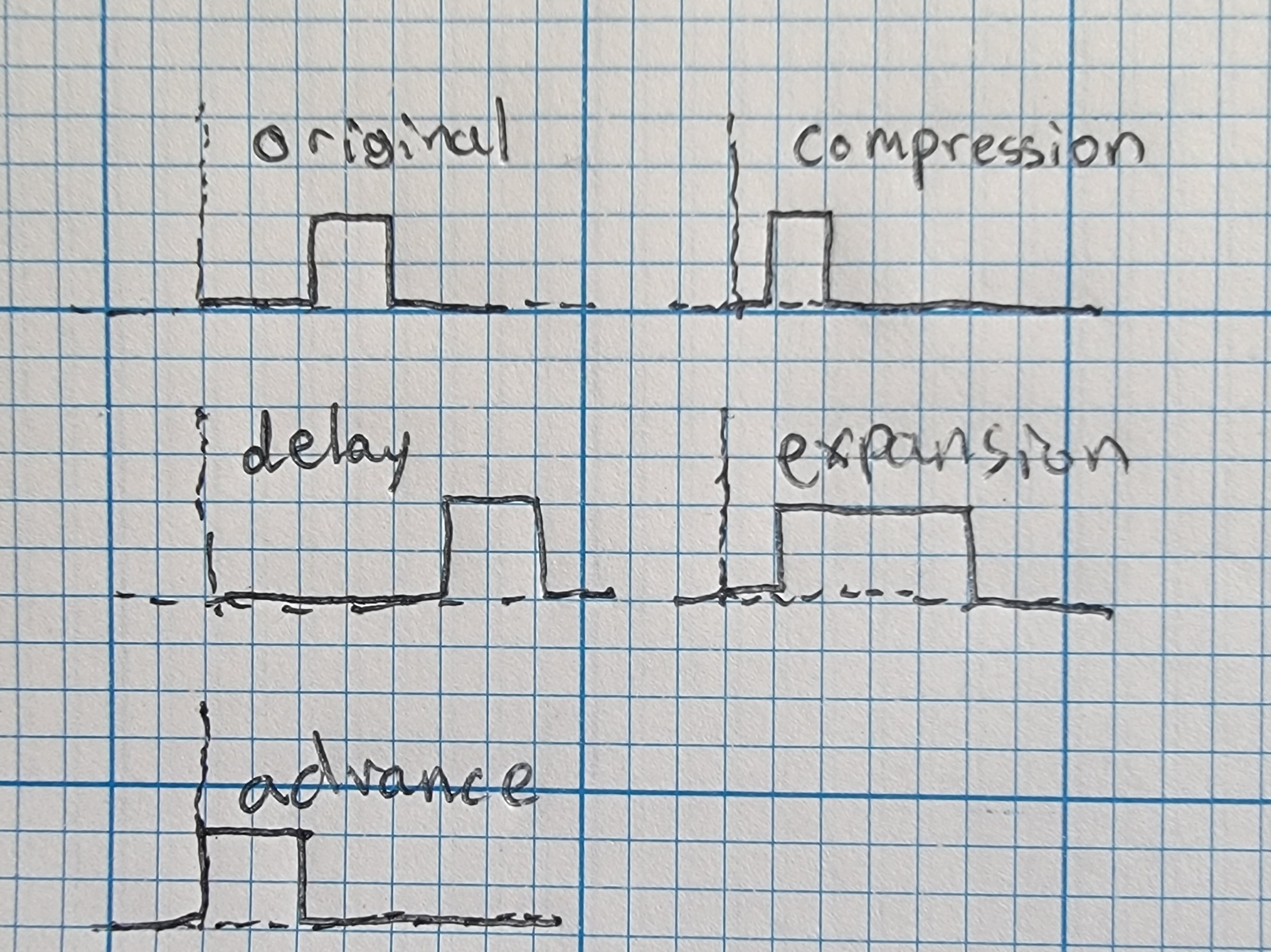
#### Time Shift
A time shift is of the form: $z(t)=x(t-\tau)$. When $\tau > 0$, the time shift is said to be a *delay*. When $\tau < 0$, the time shift is said to be an *advance*.
#### Time Scale
A time scale is of the form: $z(t)=x(at)$. For $\lvert a \rvert > 1$, the scaling is said to be a compression. For $\lvert a \rvert < 1$, the scaling is said to be an expansion. For $a < 0$, a time reflection over $t=0$ occurs.
##### Figure 1.1.1 - Signal Transformations
 ##### Figure 1.1.2 - Signal Combinations
##### Figure 1.1.2 - Signal Combinations
 ## 1.2 Combinations of Operations
### Review of Reflections
Every $t$ becomes a $-t$.
$x(t) = \begin{cases} t & 0 \leq t \leq 8 \\ 0 & otherwise \\ \end{cases}$
### Example 1
$x(t) = \begin{cases} t & 0 \leq t \leq 8 \\ 0 & otherwise \\ \end{cases}$
### How to find $y(t) = x(at - b)$
#### Method 1 (recommended)
1. Find $v(t) = x(t-b)$
1. Find $w(t) = v(\lvert a \rvert t) = x( \lvert a \rvert t - b)$
1. If $a \gt 0$, then $\lvert a \rvert = a$. $y(t) = w(t) = x(at - b)$
1. If $a \lt 0$, then $\lvert a \rvert = a$. $y(t) = w(-t) = x(-\lvert a \rvert t - b)$
#### Method 2
1. Find $v(t) = x(\lvert a \rvert t)$
1. Find $w(t) = v(t - \frac{b}{\lvert a \rvert}) = x(\lvert a \rvert \left(t - \frac{b}{\lvert a \rvert} \right))$
### Example
Find $x(3t-5)$
## Lecture 5
### The Impulse Function
$\delta(t) = \begin{cases} 0 & t \ne 0 \\ \infty & t = 0 \\ \end{cases}$
$\int_{-\infty}^{\infty} \delta(t) dt = 1$
$\delta(t - \alpha) = \begin{cases} \infty & t=\alpha \\ 0 & t \ne \alpha \\ \end{cases}$
$\delta(2t - 3) = \begin{cases} \infty & 2t-3=0, t=3/2 \\ 0 & t \ne 3/2 \end{cases}$
#### Properties
$f(t) \delta(t- \alpha) = f(\alpha) \delta(t-\alpha)$
$\int_a^b f(t) \delta(t - \alpha)dt= \begin{cases} f(\alpha) & \alpha \in [a, b] \\ 0 & otherwise \end{cases}$
#### Unit step
$u(t) = \begin{cases} 1 & t \ge 0 \\ 0 & t \lt 0 \end{cases}$
$\delta(t) = \frac{du(t)}{dt}$
$u(t) = \int_{-\infty}^{t} \delta(\tau)d\tau = \begin{cases} 1 & t \ge 0 \\ 0 & t \lt 0 \end{cases}$
$u(t - \tau) = \begin{cases} 1 & t \ge \tau \\ 0 & t \lt \tau \end{cases}$
$u(-t + 5) = \begin{cases} 1 & t \le 5 \\ 0 & t \gt 5 \end{cases}$
The difference between $u(t)$ and $u(t-1)$ is a finite support pulse from 0 to 1.
#### Ramp
$r(t) = t u(t) = \begin{cases} t & t \ge 0 \\ 0 & t \lt 0 \end{cases}$
$\frac{dr(t)}{dt} = \frac{tdu(t)}{dt} + (1)u(t) = t\delta(t) + u(t) = u(t)$
#### Derivatives
1. $\cos(2 \pi t)\left[ u(t) - u(t-1) \right] = \begin{cases} 0 & t \lt 0 \\ \cos(2\pi t) & 0 \le t \lt 1 \\ 0 & t \ge 1 \end{cases}$
Using the product rule:
$\cos(2\pi t)\left[ \delta(t) - \delta(t-1) \right] + -\sin(2\pi t)(2\pi)\left[u(t)-u(t-1)\right]$
1. $u(t) - 2u(t-1) + u(t-2) = \begin{cases} 0 & t \lt 0 \\ 1 & 0 \le t \lt 1 \\ -1 & 1 \le t \lt 2 \\ 0 & t \ge 2 \end{cases}$
## Energy and Power of Signals
### Energy
The energy of a signal $x(t)$ could be finite or infinite.
Given a real or complex signal, $x(t)$, the energy, $E_x$, is defined as:
$$E_x = \int_{-\infty}^{\infty} \lvert x(t) \rvert^2 dt$$
1. If $x(t)$ has finite support, the domain is $[a, b]$, and therefore $E_x$ is a finite integral with bounds $a$ and $b$.
1. If $x(t)$ has infinite support, $E_x$ is an improper integral and may or may not have finite value.
1. If $x(t)$ is periodic, $E_x$ is infinite.
### Power
The power, $P_x$, of an aperiodic signal is defined as:
$$P_x = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} \lvert x(t) \rvert^2 dt$$
The power, $P_x$, of a periodic signal with period, $T_0$, $x(t)$ is defined as:
$$P_x = \frac{1}{T_0}\int_{t_0}^{t_0 + T_0} \lvert x(t) \rvert^2 dt$$
The most convenient starting times, $t_0$ are $-\frac{T_0}{2}$ and $0$. The bounds of integration will be $\left[ -\frac{T_0}{2}, \frac{T_0}{2} \right]$ and $\left[ 0, T_0 \right]$ respectively.
For a periodic signal, the power is the energy of one period normalized by the length of the period.
**FACT:** A finite energy aperiodic signal has zero power.
$$P_x = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} \lvert x(t) \rvert^2 dt$$
$$=\lim_{T \to \infty} \frac{1}{2T} [N]$$
Where $N$ is some finite number.
$$\lim_{T \to \infty} \frac{N}{2T} = 0$$
### Procedure
1. Determine if $x(t)$ is finite support or infinite support.
- If finite support: $E_x \lt \infty$, $P_x = 0$
1. If $x(t)$ is infinite support, determine periodicity of $x(t)$
- If aperiodic, calculate $E_x$, $P_x$
- If periodic: $E_x = \infty$, calculate $P_x$
### Facts
If:
$$x(t) = A\cos(\omega_0 t + \theta)$$
Then:
$$E_x = \infty$$
$$P_x = \frac{A^2}{2}$$
If:
$$x(t) = \sum_k A_k\cos(\omega_k t + \theta)$$
Then:
$$E_x = \infty$$
$$P_x = \sum_k \frac{A_k^2}{2}$$
## 1.2 Combinations of Operations
### Review of Reflections
Every $t$ becomes a $-t$.
$x(t) = \begin{cases} t & 0 \leq t \leq 8 \\ 0 & otherwise \\ \end{cases}$
### Example 1
$x(t) = \begin{cases} t & 0 \leq t \leq 8 \\ 0 & otherwise \\ \end{cases}$
### How to find $y(t) = x(at - b)$
#### Method 1 (recommended)
1. Find $v(t) = x(t-b)$
1. Find $w(t) = v(\lvert a \rvert t) = x( \lvert a \rvert t - b)$
1. If $a \gt 0$, then $\lvert a \rvert = a$. $y(t) = w(t) = x(at - b)$
1. If $a \lt 0$, then $\lvert a \rvert = a$. $y(t) = w(-t) = x(-\lvert a \rvert t - b)$
#### Method 2
1. Find $v(t) = x(\lvert a \rvert t)$
1. Find $w(t) = v(t - \frac{b}{\lvert a \rvert}) = x(\lvert a \rvert \left(t - \frac{b}{\lvert a \rvert} \right))$
### Example
Find $x(3t-5)$
## Lecture 5
### The Impulse Function
$\delta(t) = \begin{cases} 0 & t \ne 0 \\ \infty & t = 0 \\ \end{cases}$
$\int_{-\infty}^{\infty} \delta(t) dt = 1$
$\delta(t - \alpha) = \begin{cases} \infty & t=\alpha \\ 0 & t \ne \alpha \\ \end{cases}$
$\delta(2t - 3) = \begin{cases} \infty & 2t-3=0, t=3/2 \\ 0 & t \ne 3/2 \end{cases}$
#### Properties
$f(t) \delta(t- \alpha) = f(\alpha) \delta(t-\alpha)$
$\int_a^b f(t) \delta(t - \alpha)dt= \begin{cases} f(\alpha) & \alpha \in [a, b] \\ 0 & otherwise \end{cases}$
#### Unit step
$u(t) = \begin{cases} 1 & t \ge 0 \\ 0 & t \lt 0 \end{cases}$
$\delta(t) = \frac{du(t)}{dt}$
$u(t) = \int_{-\infty}^{t} \delta(\tau)d\tau = \begin{cases} 1 & t \ge 0 \\ 0 & t \lt 0 \end{cases}$
$u(t - \tau) = \begin{cases} 1 & t \ge \tau \\ 0 & t \lt \tau \end{cases}$
$u(-t + 5) = \begin{cases} 1 & t \le 5 \\ 0 & t \gt 5 \end{cases}$
The difference between $u(t)$ and $u(t-1)$ is a finite support pulse from 0 to 1.
#### Ramp
$r(t) = t u(t) = \begin{cases} t & t \ge 0 \\ 0 & t \lt 0 \end{cases}$
$\frac{dr(t)}{dt} = \frac{tdu(t)}{dt} + (1)u(t) = t\delta(t) + u(t) = u(t)$
#### Derivatives
1. $\cos(2 \pi t)\left[ u(t) - u(t-1) \right] = \begin{cases} 0 & t \lt 0 \\ \cos(2\pi t) & 0 \le t \lt 1 \\ 0 & t \ge 1 \end{cases}$
Using the product rule:
$\cos(2\pi t)\left[ \delta(t) - \delta(t-1) \right] + -\sin(2\pi t)(2\pi)\left[u(t)-u(t-1)\right]$
1. $u(t) - 2u(t-1) + u(t-2) = \begin{cases} 0 & t \lt 0 \\ 1 & 0 \le t \lt 1 \\ -1 & 1 \le t \lt 2 \\ 0 & t \ge 2 \end{cases}$
## Energy and Power of Signals
### Energy
The energy of a signal $x(t)$ could be finite or infinite.
Given a real or complex signal, $x(t)$, the energy, $E_x$, is defined as:
$$E_x = \int_{-\infty}^{\infty} \lvert x(t) \rvert^2 dt$$
1. If $x(t)$ has finite support, the domain is $[a, b]$, and therefore $E_x$ is a finite integral with bounds $a$ and $b$.
1. If $x(t)$ has infinite support, $E_x$ is an improper integral and may or may not have finite value.
1. If $x(t)$ is periodic, $E_x$ is infinite.
### Power
The power, $P_x$, of an aperiodic signal is defined as:
$$P_x = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} \lvert x(t) \rvert^2 dt$$
The power, $P_x$, of a periodic signal with period, $T_0$, $x(t)$ is defined as:
$$P_x = \frac{1}{T_0}\int_{t_0}^{t_0 + T_0} \lvert x(t) \rvert^2 dt$$
The most convenient starting times, $t_0$ are $-\frac{T_0}{2}$ and $0$. The bounds of integration will be $\left[ -\frac{T_0}{2}, \frac{T_0}{2} \right]$ and $\left[ 0, T_0 \right]$ respectively.
For a periodic signal, the power is the energy of one period normalized by the length of the period.
**FACT:** A finite energy aperiodic signal has zero power.
$$P_x = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} \lvert x(t) \rvert^2 dt$$
$$=\lim_{T \to \infty} \frac{1}{2T} [N]$$
Where $N$ is some finite number.
$$\lim_{T \to \infty} \frac{N}{2T} = 0$$
### Procedure
1. Determine if $x(t)$ is finite support or infinite support.
- If finite support: $E_x \lt \infty$, $P_x = 0$
1. If $x(t)$ is infinite support, determine periodicity of $x(t)$
- If aperiodic, calculate $E_x$, $P_x$
- If periodic: $E_x = \infty$, calculate $P_x$
### Facts
If:
$$x(t) = A\cos(\omega_0 t + \theta)$$
Then:
$$E_x = \infty$$
$$P_x = \frac{A^2}{2}$$
If:
$$x(t) = \sum_k A_k\cos(\omega_k t + \theta)$$
Then:
$$E_x = \infty$$
$$P_x = \sum_k \frac{A_k^2}{2}$$